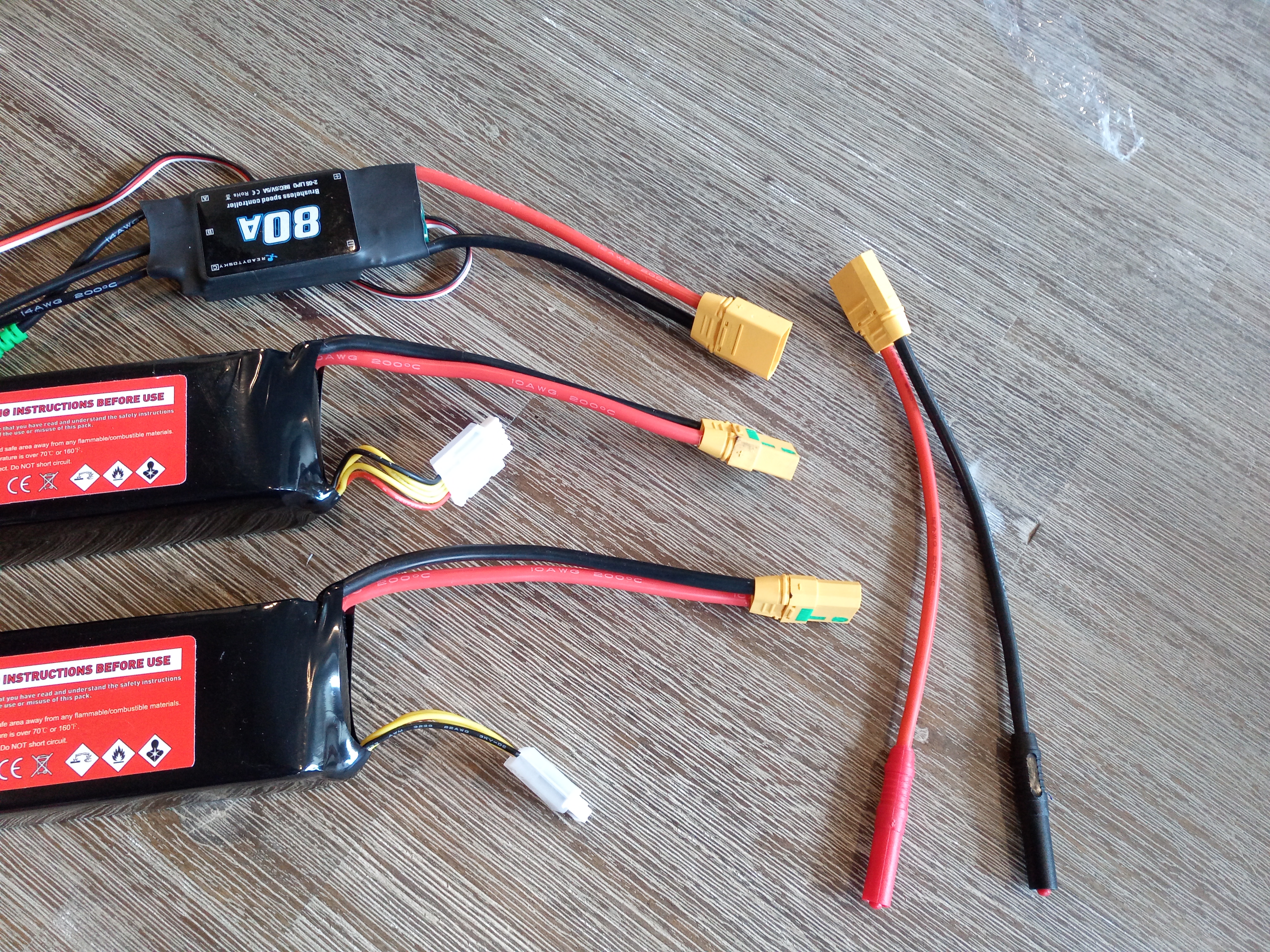
My XT90 connectors arrived, so I installed them on my charged batteries and Electronic Speed Controller. I am impressed by their heat resistance because I had to hold the soldering iron on them for a long time. Now I understand why there is a market for heatsinks designed for these connectors. I made three shielded banana plug extensions to link my ESC and motor.
 Upgraded parts
Upgraded parts
I modified my Arduino program to use standard servo/ESC timing instead of my hobby servo's expanded time range. I kept the servo attached as visual feedback, but it only moves 90°.
I won't use the pushbuttons to control my speed if I'm wearing the skates because the likelihood that they would go out of control before I could press the correct button is too high. I installed a spring-to-center joystick and mapped the input to a percentage. I created a function that turned the 0-100 into a timing pulse, which is what the Arduino servo library does, but I have control over my code. The code also recognizes when I push down on the joystick and will report it as "braking," but it doesn't take any action. I tested the apparatus, which lacked strength at low speed but could apply power and accelerate once I got to a jogging pace. I could have gone faster than my test, but it got scary.
 Speed and servo angle are proportional, cat toesies are optional
Speed and servo angle are proportional, cat toesies are optional
The rest of the posts for this project have been arranged by date.
First time here?
Completed projects from year 1
Completed projects from year 2
Completed projects from year 3
Completed projects from year 4
Completed projects from year 5
Completed projects from year 6
Completed projects from year 7
Completed projects from year 8
Disclaimer for http://24hourengineer.blogspot.com and 24HourEngineer.com
This disclaimer must be intact and whole. This disclaimer must be included if a project is distributed.
All information on this blog, or linked by this blog, is not to be taken as advice or solicitation. Anyone attempting to replicate, in whole or in part, is responsible for the outcome and procedure. Any loss of functionality, money, property, or similar, is the responsibility of those involved in the replication.
All digital communication regarding the email address 24hourengineer@gmail.com becomes the intellectual property of Brian McEvoy. Any information contained within these messages may be distributed or retained at the discretion of Brian McEvoy. Any email sent to this address, or any email account owned by Brian McEvoy, cannot be used to claim property or assets.
Comments to the blog may be utilized or erased at the discretion of the owner. No one posting may claim property or assets based on their post.
This blog, including pictures and text, is copyright to Brian McEvoy.
2022-10-28
I modified my Arduino program to use standard servo/ESC timing instead of my hobby servo's expanded time range. I kept the servo attached as visual feedback, but it only moves 90°.
I won't use the pushbuttons to control my speed if I'm wearing the skates because the likelihood that they would go out of control before I could press the correct button is too high. I installed a spring-to-center joystick and mapped the input to a percentage. I created a function that turned the 0-100 into a timing pulse, which is what the Arduino servo library does, but I have control over my code. The code also recognizes when I push down on the joystick and will report it as "braking," but it doesn't take any action. I tested the apparatus, which lacked strength at low speed but could apply power and accelerate once I got to a jogging pace. I could have gone faster than my test, but it got scary.

The rest of the posts for this project have been arranged by date.
First time here?
Completed projects from year 1
Completed projects from year 2
Completed projects from year 3
Completed projects from year 4
Completed projects from year 5
Completed projects from year 6
Completed projects from year 7
Completed projects from year 8
Disclaimer for http://24hourengineer.blogspot.com and 24HourEngineer.com
This disclaimer must be intact and whole. This disclaimer must be included if a project is distributed.
All information on this blog, or linked by this blog, is not to be taken as advice or solicitation. Anyone attempting to replicate, in whole or in part, is responsible for the outcome and procedure. Any loss of functionality, money, property, or similar, is the responsibility of those involved in the replication.
All digital communication regarding the email address 24hourengineer@gmail.com becomes the intellectual property of Brian McEvoy. Any information contained within these messages may be distributed or retained at the discretion of Brian McEvoy. Any email sent to this address, or any email account owned by Brian McEvoy, cannot be used to claim property or assets.
Comments to the blog may be utilized or erased at the discretion of the owner. No one posting may claim property or assets based on their post.
This blog, including pictures and text, is copyright to Brian McEvoy.
2022-10-28
Comments
Post a Comment